一个字符编码引发的惨案……
今天,开开心心学习 opencv 的 C++ 源码,在匹配 SURF 特征的源码中,Debug 出现:

定位到 bug 行:

有毛病吗?没毛病啊!
我是从这里复制的啊
然后,把路径赋值给 char 变量,cout 一下,多了一个问号????

看来是复制过来的字符编码有问题,有时候眼见不一定为实啊!
手动输入后,Debug
这就很正常了嘛
源码:
#include <iostream>
#include<opencv2\opencv.hpp>
#include"opencv2/xfeatures2d.hpp"
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
using namespace cv::ml;
int main()
{
Mat a = imread("C:/Users/Lee/Desktop/frame10.png", 0); //读取灰度图像
Mat b = imread("C:/Users/Lee/Desktop/frame11.png", 0);
Ptr<SURF> surf; //创建方式和opencv2中的不一样
// Ptr<SIFT> sift;
surf = SURF::create(800); //阈值
BFMatcher matcher; //匹配器
Mat c, d;
vector<KeyPoint> key1, key2;
vector<DMatch> matches;
//结果为一个Mat矩阵,它的行数与特征点向量中元素个数是一致的。每行都是一个N维描述子的向量
surf->detectAndCompute(a, Mat(), key1, c); //检测关键点和匹配描述子
surf->detectAndCompute(b, Mat(), key2, d);
matcher.match(c, d, matches); // 匹配,得到匹配向量
sort(matches.begin(), matches.end()); // 匹配点排序
vector< DMatch > good_matches; // 匹配两幅图像的描述子
int ptsPairs = min(50, (int)(matches.size() * 0.15));
cout << ptsPairs << endl;
for (int i = 0; i < ptsPairs; i++) // 将匹配较好的特征点存入good_matches中
{
good_matches.push_back(matches[i]);
}
Mat outimg;
drawMatches( // 绘制匹配点
a, // 原图像1
key1, // 原图像1的特征点
b, // 原图像2
key2, // 原图像2的特征点
good_matches, // 原图像1的特征点匹配原图像2的特征点[matches[i]]
outimg, // 输出图像具体由flags决定
Scalar::all(-1), // 匹配的颜色(特征点和连线),若matchColor==Scalar::all(-1),颜色随机
Scalar::all(-1), // 单个点的颜色,即未配对的特征点,若matchColor==Scalar::all(-1),颜色随机
vector<char>(), // Mask决定哪些点将被画出,若为空,则画出所有匹配点
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //Fdefined by DrawMatchesFlags
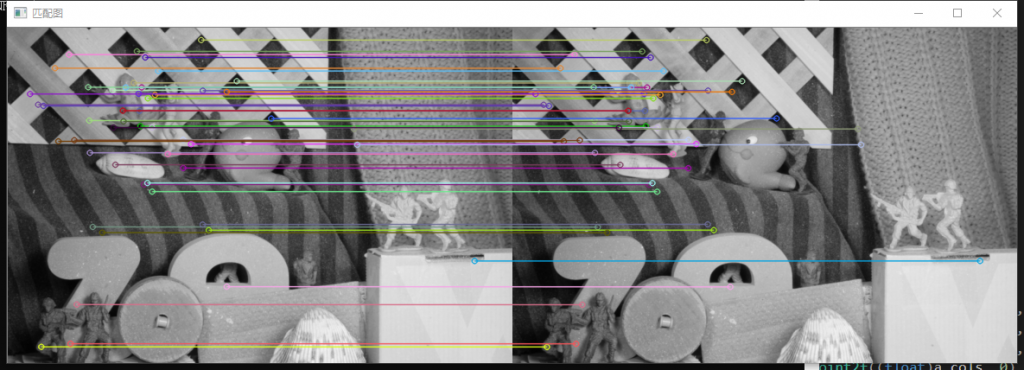
imshow("匹配图", outimg);
waitKey();
vector<Point2f> obj;
vector<Point2f> scene;
for (size_t i = 0; i < good_matches.size(); i++)
{
////good_matches[i].queryIdx保存着第一张图片匹配点的序号,keypoints_1[good_matches[i].queryIdx].pt.x 为该序号对应的点的x坐标
obj.push_back(key1[good_matches[i].queryIdx].pt);
scene.push_back(key2[good_matches[i].trainIdx].pt);
}
vector<Point2f> scene_corners(4);
vector<Point2f> obj_corners(4);
obj_corners[0] = Point(0, 0);
obj_corners[1] = Point(a.cols, 0);
obj_corners[2] = Point(a.cols, a.rows);
obj_corners[3] = Point(0, a.rows);
Mat H = findHomography( // 在两个平面之间寻找单映射变换矩阵
obj, // 在原平面上点的坐标
scene, // 在目标平面上点的坐标
RANSAC); // 用于计算单映射矩阵的方法
perspectiveTransform( // 向量组的透视变换
obj_corners, // 输入两通道或三通道的浮点数组,每一个元素是一个2D/3D 的矢量转换
scene_corners, // 输出和src同样的size和type
H); // 3x3 或者4x4浮点转换矩阵
// 绘制
line(outimg, scene_corners[0] + Point2f((float)a.cols, 0), scene_corners[1] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[1] + Point2f((float)a.cols, 0), scene_corners[2] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[2] + Point2f((float)a.cols, 0), scene_corners[3] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[3] + Point2f((float)a.cols, 0), scene_corners[0] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
imshow("匹配图", outimg);
waitKey(0);
}